SHARAD

SHARAD (Mars SHAllow RADar sounder) is a subsurface sounding radar embarked on the Mars Reconnaissance Orbiter probe. It complements the MARSIS instrument on Mars Express,[1] providing lower penetration capabilities (some hundred meters) but much finer resolution (15 metres - untapered - in free space).
SHARAD was developed under the responsibility of the Italian Space Agency (ASI, Agenzia Spaziale Italiana), and provided to JPL for use on board the Mars Reconnaissance Orbiter Spacecraft in the frame of a NASA/ASI agreement which foresees exploitation of the data by a joint Italian/US team. The INFOCOM dept. of the University of Sapienza University of Rome is rensponsible for the whole mission, while Alcatel Alenia Space Italia (formerly Alenia Spazio) designed and built the instrument. SHARAD operations are managed by INFOCOM from the SHARAD Operation Centre (SHOC), located within the Alcatel Alenia Space facilities in the suburbs of Rome.
Science objectives

SHARAD is intended to map the first kilometer below the Mars surface, providing images of subsurface scattering layers with high vertical resolution (15 m), with the intent to locate water/ice/ deposits and to map the vertical structure of the upper subsurface layers.
Characteristics
SHARAD operates on a carrier frequency of 20 MHz, transmitting a "chirped" signal with a bandwidth of 10 MHz. Pulsewidth is 85 μs and the nominal Pulse Repetition Frequency is 700.28 Hz. Transmitted power is 10 W peak. The antenna is a 10 m dipole. A synthetic aperture is generated on-ground to reduce the unwanted surface returns from off-nadir scatterers at the same range of the subsurface echoes.
SHARAD is physically divided into two elements:
- the SEB (SHARAD electronic box), which contains all the electronics (instrument controller, transmitter, receiver and antenna impedance matching network), within a metal frame which acts as thermal radiator for the electronic modules inside (Mars Reconnaissance Orbiter is an open frame spacecraft, and SHARAD has an autonomous thermal control)
- the antenna, made by two fiber tubes, folded and stowed in a cradle (covered by thermal insulator to protect it from the heating induced by the aerobraking). Once released, the antenna extends into position thanks only to the elastic property of the material. A metal wire running inside the non-conductive tubes represents the real radiating element of the antenna. The antenna was designed and manufactured by Northrop Grumman Astro Aerospace in Carpinteria, CA.
The instrument operates at fixed PRF (700.28 Hz) and the echo is received in rank 1 (i.e., after the second transmitted pulse). Two alternate (higher and lower) PRF are available to deal with the extended mission orbit range. An open-loop tracking system, based on a priori knowledge of the surface topography, is the nominal means to position the 135 μs receive window on the expected echo position (a closed-loop tracker is available as backup).
The instrument on-board signal processing is minimal, and consists in a coherent presuming of the received echoes (programmable between 1 and 32 in power of 2 steps) to reduce the generated data rate, with programmable number of bits (8, 6, 4).
The chirp signal is generated directly on the 20 MHz carrier by a digital chirp generator, and fed to the power amplifier, followed by a Transmit/Receive switch and the matching network. The receiver provides amplification, filtering and digital gain control directly at RF, and the digitised using an undersampling technique at a rate of 26.6 MHz. A single digital signal processor provides both the control and processing function.
The instrument industrial team is composed as follows:
- Instrument design, integration and test: Alcatel Alenia Space Italia (Rome plant)
- DES (Digital electronics subsystem): Alcatel Alenia Space Italia (Milan plant - formerly Laben)
- Chirp Generator, Receiver: Alcatel Alenia Space Italia (Rome/L'Aquila plants)
- Transmitter, matching network: Galileo Avionica (Milan, Italy)
- Antenna: Astro Aerospace (Carpinteria, CA, USA)
History
While the initial studies date back to 2001, full-scale development was released only in February 2003. The Engineering Model (EM) of the instrument was delivered to Lockheed Martin Space Systems in Denver (responsible for the spacecraft) in March 2004, and integrated into the Orbiter Test Bed. The ProtoFlight Model (PFM) was delivered and integrated on the Mars Reconnaissance Orbiter Spacecraft in Denver in September 2004. Mars Reconnaissance Orbiter was launched from Cape Canaveral Air Force Station on August 12, 2005, with an Atlas V-Centaur launch vehicle, and reached Mars orbit on March 10, 2006. The aerobraking phase, needed to reach the operational orbit, lasted until August 30, 2006. On September 17, 2006, the SHARAD antenna was deployed, and the first in-flight test of the radar was successfully carried out on September 19. SHARAD has been operational since November 2006.
Findings
The SHARAD radar penetrated the north polar layered ice deposits of Mars and revealed a relatively small (about 100 meter) maximum deflection of the underlying rock, which suggests a strong lithosphere greater than 300 kilometers thick.[2] Radar results consistent with massive deposits of water ice in middle latitudes support a debris-covered glacier hypothesis.[3]
On November 22, 2016, NASA reported finding a large amount of underground ice in the Utopia Planitia region of Mars using SHARAD. The volume of water detected has been estimated to be equivalent to the volume of water in Lake Superior.[4][5][6]
Scalloped terrain led to the discovery of a large amount of underground ice
enough water to fill Lake Superior (November 22, 2016)[4][5][6]
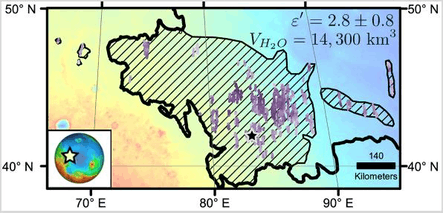
The calculations for the volume of water ice in the region were based on measurements from SHARAD, the ground-penetrating radar instrument on the Mars Reconnaissance Orbiter.

Interactive Mars map
References
- ↑ R. Orosei et al., "Science results from the MARSIS and SHARAD subsurface sounding radars on Mars and their relevance to radar sounding of icy moons in the Jovian system", EPSC2010-726, European Planetary Science Congress 2010, Vol. 5 (accessed Nov. 17 2014)
- ↑ Phillips, R. J.; Zuber, M. T.; Smrekar, S. E.; Mellon, M. T.; Head, J. W.; Tanaka, K. L.; Putzig, N. E.; Milkovich, S. M.; Campbell, B. A.; Plaut, J. J.; Safaeinili, A.; Seu, R.; Biccari, D.; Carter, L. M.; Picardi, G.; Orosei, R.; Mohit, P. S.; Heggy, E.; Zurek, R. W.; Egan, A. F.; Giacomoni, E.; Russo, F.; Cutigni, M.; Pettinelli, E.; Holt, J. W.; Leuschen, C. J.; Marinangeli, L. (2008). "Mars north polar deposits: stratigraphy, age, and geodynamical response". Science. 320 (5880): 1182–1185. Bibcode:2008Sci...320.1182P. doi:10.1126/science.1157546. PMID 18483402.
- ↑ Holt, J. W.; Safaeinili, A.; Plaut, J. J.; Head, J. W.; Phillips, R. J.; Seu, R.; Kempf, S. D.; Choudhary, P.; Young, D. A.; Putzig, N. E.; Biccari, D.; Gim, Y. (2008). "Radar Sounding Evidence for Buried Glaciers in the Southern Mid-Latitudes of Mars". Science. 322 (5905): 1235–1238. Bibcode:2008Sci...322.1235H. doi:10.1126/science.1164246. PMID 19023078.
- 1 2 Staff (November 22, 2016). "Scalloped Terrain Led to Finding of Buried Ice on Mars". NASA. Retrieved November 23, 2016.
- 1 2 "Lake of frozen water the size of New Mexico found on Mars – NASA". The Register. November 22, 2016. Retrieved November 23, 2016.
- 1 2 "Mars Ice Deposit Holds as Much Water as Lake Superior". NASA. November 22, 2016. Retrieved November 23, 2016.
Further reading
- R. Croci et al. - SHARAD Design and Operation" - IGARSS 2007 Proceedings, Barcelona, 2007.]
External links
- SHARAD page on the Mars Reconnaissance Orbiter site
- SHARAD page on the Agenzia Spaziale Italiana site
- NASA PDS Instrument Profile for SHARAD