Skewed generalized t distribution
In probability and statistics, the skewed generalized “t” distribution is a family of continuous probability distributions. The distribution was first introduced by Panayiotis Theodossiou[1] in 1998. The distribution has since been used in different applications.[2][3][4][5][6][7] There are different parameterizations for the skewed generalized t distribution,[1][5] which we account for in this article.
Definition
Probability density function

where is the beta function, is the location parameter, is the scale parameter, is the skewness parameter, and and are the parameters that control the kurtosis. Note that and are not parameters, but functions of the other parameters that are used here to scale or shift the distribution appropriately to match the various parameterizations of this distribution.








In the original parameterization[1] of the skewed generalized t distribution,

and
- .

These values for and yield a distribution with mean of if and a variance of if . In order for to take on this value however, it must be the case that . Similarly, for to equal the above value, .



The parameterization that yields the simplest functional form of the probability density function sets and . This gives a mean of



and a variance of

The parameter controls the skewness of the distribution. To see this, let denote the mode of the distribution, and note that



Since , the probability left of the mode, and therefore right of the mode as well, can equal any value in (0,1) depending on the value of . Thus the skewed generalized t distribution can be highly skewed as well as symmetric. If , then the distribution is negatively skewed. If , then the distribution is positively skewed. If , then the distribution is symmetric.



Finally, and control the kurtosis of the distribution. As and get smaller, the kurtosis increases[1] (i.e. becomes more leptokurtic). Large values of and yield a distribution that is more platykurtic.


Moments
Let be a random variable distributed with the skewed generalized t distribution.The moment (i.e. ), for , is:


![{\displaystyle E[(X-E(X))^{h}]}](../I/m/2689202585a1c40738d9b5214219f9f77f7dcf08.svg)


The mean, for , is:

The variance (i.e. ), for , is:
![{\displaystyle E[(X-E(X))^{2}]}](../I/m/8ddf7d92a1c2f7e74e527a47f375a2eb351230b0.svg)

The skewness (i.e. ), for , is:
![{\displaystyle E[(X-E(X))^{3}]}](../I/m/9fae47d6525887ba6b2747b1c0d78e90219b935e.svg)



The kurtosis (i.e. ), for , is:
![{\displaystyle E[(X-E(X))^{4}]}](../I/m/4e3ac349fa0833184587b4786e617fa2462273cb.svg)




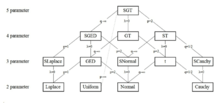
Special Cases
Special and limiting cases of the skewed generalized t distribution include the skewed generalized error distribution, the generalized t distribution introduced by McDonald and Newey,[6] the skewed t proposed by Hansen,[8] the skewed Laplace distribution, the generalized error distribution (also known as the generalized normal distribution), a skewed normal distribution, the student t distribution, the skewed Cauchy distribution, the Laplace distribution, the uniform distribution, the normal distribution, and the Cauchy distribution. The graphic below, adapted from Hansen, McDonald, and Newey,[2] shows which parameters should be set to obtain some of the different special values of the skewed generalized t distribution.
skewed generalized error distribution
The Skewed Generalized Error Distribution has the pdf:


where

gives a mean of . Also

gives a variance of .
generalized t distribution
The Generalized T Distribution has the pdf:


where

gives a variance of .
skewed t distribution
The Skewed T Distribution has the pdf:


where

gives a mean of . Also

gives a variance of .
skewed Laplace distribution
The Skewed Laplace Distribution has the pdf:


where

gives a mean of . Also
![{\displaystyle v=[2(1+\lambda ^{2})]^{-{\frac {1}{2}}}}](../I/m/2adf227609d7380639991940b14a983af872a202.svg)
gives a variance of .
generalized error distribution
The Generalized Error Distribution (also known as the generalized normal distribution) has the pdf:


where

gives a variance of .
skewed normal distribution
The Skewed Normal Distribution has the pdf:


where

gives a mean of . Also

gives a variance of .
student's t-distribution
The Student's t-distribution has the pdf:


Note that we substituted .

skewed Cauchy distribution
The Skewed Cauchy Distribution has the pdf:


Note that we substituted and .
Laplace distribution
The Laplace distribution has the pdf:


Note that we substituted .
Uniform Distribution
The Uniform distribution has the pdf:


Thus the standard uniform parameterization is obtained if , , and .


Normal distribution
The Normal distribution has the pdf:


where
gives a variance of .
Cauchy Distribution
The Cauchy distribution has the pdf:


Note that we substituted .
References
- Hansen, B. (1994). "Autoregressive Conditional Density Estimation". International Economic Review. 35: 705–730. doi:10.2307/2527081.
- Hansen, C.; McDonald, J.; Newey, W. (2010). "Enstrumental Variables Estimation with Flexible Distributions". Journal of Business and Economic Statistics. 28: 13–25. doi:10.1198/jbes.2009.06161.
- Hansen, C.; McDonald, J.; Theodossiou, P. (2007). "Some Flexible Parametric Models for Partially Adaptive Estimators of Econometric Models". economics-ejournal.
- McDonald, J.; Michefelder, R.; Theodossiou, P. (2009). "Evaluation of Robust Regression Estimation Methods and Intercept Bias: A Capital Asset Pricing Model Application". Multinational Finance Journal. 15: 293–321.
- McDonald, J.; Michelfelder, R.; Theodossiou, P. (2010). "Robust Estimation with Flexible Parametric Distributions: Estimation of Utility Stock Betas". Quantitative Finance: 375–387.
- McDonald, J.; Newey, W. (1988). "Partially Adaptive Estimation of Regression Models via the Generalized t Distribution". Econometric Theory. 4: 428–457. doi:10.1017/s0266466600013384.
- Savva, C.; Theodossiou, P. (2015). "Skewness and the Relation between Risk and Return". Management Science.
- Theodossiou, P. (1998). "Financial Data and the Skewed Generalized T Distribution". Management Science. 44: 1650–1661. doi:10.1287/mnsc.44.12.1650.
External links
Notes
- 1 2 3 4 Theodossiou, P (1998). "Financial Data and the Skewed Generalized T Distribution". Management Science. 44: 1650–1661. doi:10.1287/mnsc.44.12.1650.
- 1 2 Hansen, C.; McDonald, J.; Newey, W. (2010). "Enstrumental Variables Estimation with Flexible Distributions". Journal of Business and Economic Statistics. 28: 13–25. doi:10.1198/jbes.2009.06161.
- ↑ Hansen, C., J. McDonald, and P. Theodossiou (2007) "Some Flexible Parametric Models for Partially Adaptive Estimators of Econometric Models" economics-ejournal
- ↑ McDonald, J.; Michelfelder, R.; Theodossiou, P. (2009). "Evaluation of Robust Regression Estimation Methods and Intercept Bias: A Capital Asset Pricing Model Application". Multinational Finance Journal. 15: 293–321.
- 1 2 McDonald J., R. Michelfelder, and P. Theodossiou (2010) "Robust Estimation with Flexible Parametric Distributions: Estimation of Utility Stock Betas" Quantitative Finance 375-387.
- 1 2 McDonald, J.; Newey, W. (1998). "Partially Adaptive Estimation of Regression Models via the Generalized t Distribution". Econometric Theory. 4: 428–457.
- ↑ Savva C. and P. Theodossiou (2015) "Skewness and the Relation between Risk and Return" Management Science, forthcoming.
- ↑ Hansen, B (1994). "Autoregressive Conditional Density Estimation". International Economic Review. 35: 705–730. doi:10.2307/2527081.
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||