RanaVision
|
| |
| Developer(s) | Mark A. O'Neill |
|---|---|
| Stable release |
2.00
/ August 18, 2016 |
| Written in | C |
| Operating system | Linux |
| Platform | IA-32 x86-64 ARM |
| License | Proprietary commercial software |
| Website |
www |


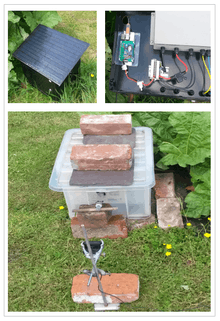
Rana motion vision system is a motion detection which uses vision to detect the presence of objects within its visual field. Rana is based on the open source motion package for Linux but has significantly enhanced motion detection capabilities. It has been designed top operate as an efficient camera trap system for recording the movements of small invertebrates, capable of operating autonomously in the field for extended periods. To date, Rana has been used a number of projects looking at pollinators including studies of bumblebee activity in the vicinity of their nests [1] and of the behaviour of hover flies and other pollinators at flowers [2] .[3]

Rana system setup
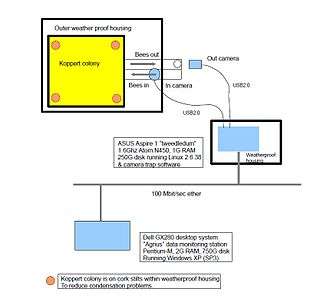
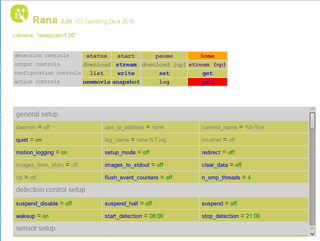
Here we see a typical Rana setup for observing bumblebees in the vicinity of their colony. The colony is mounted on cork stilts inside an outer (plastic) weatherproof housing. Bees are channelled in and out of the nest via a one way system. Each channel is monitored using a Philips Phillips SPC1330N autofocus USB camera which are connected to the Asus Aspire one data logging computer via USB 2.0 connections. This logging computer runs C code which implements a motion detector which is loosely modelled on the frog visual system (e.g. a blob detector which capable of detecting and tracking blobs of a user determined size). This motion code is running on top of a Linux kernel. This offers a relatively good real time performance on the relatively slow Atom N450 processor which was chosen to keep power consumption low (so the logger can operate stand-alone with solar panels in remote field locations). The data logger is connected to the outside world via 100 Mbit/second Ethernet (WIFI or mobile phone dongle could be substituted in remote field locations). The system is controlled via a web interface on the remote monitoring computer. With high end cameras like the Phillips Phillips SPC1330N it is possible to point and focus the cameras from the monitoring station too.

in addition to detecting moving blobs, the Rana system can also track the path of these blobs through its visual field. If required be split into a number of sub-fields within which blobs can be tracked independently. This permits a single camera to monitor a number of visual channels reducing system hardware complexity and expense.
Subsequently, RANA has been ported onto a number of low power ARM based devices such as the Raspberry Pi and Odroid C1 which can be operated off the grid in remote field locations. Remote control of Rana (and live video streaming from the camera(s) monitored by Rana is accomplished via a web services interface. These systems have recently been used by researchers at the Royal Botanic Gardens Kew to monitor the activities of pollinators at floral patches both within Kew and also in the field in order to determine the pollinators of the rare Pasque Flower in the Chiltern Hills. In addition, it has also been used with near infra-red night vision cameras to monitor the activities of nocturnal invertebrates including cockroaches , moths and bed bugs.


References
- ↑ Morrison, Emma (2012). "Commercially imported bumblebees: Competition for natives? A foraging activity comparison" (PDF). 3rd Year Project Report, University of Newcastle upon Tyne.
- ↑ O'Neill, Mark A.; Barlow, Sarah; Port, Gordon (2010). "Recording pollinator visitation to Rhinathus minor using an automated motion sensitive detection system" (PDF). Ento'10, University of Swansea.
- ↑ Reed, Daniel; Tosh, Colin R.; O'Neill, Mark A. (2012). "Olfactory learning in Hoverflies" (PDF). ASAB Easter Meeting.