Kinetic heap

A Kinetic Heap is a kinetic data structure, obtained by the kinetization of a heap. It is designed to store elements (keys associated with priorities) where the priority is changing as a continuous function of time. As a type of kinetic priority queue, it maintains the maximum priority element stored in it. The kinetic heap data structure works by storing the elements as a tree that satisfies the following heap property - if B is a child node of A, then the priority of the element in A must be higher than the priority of the element in B. This heap property is enforced using certificates along every edge so, like other kinetic data structures, a kinetic heap also contains a priority queue (the event queue) to maintain certificate failure times.
Implementation and operations
A regular heap can be kinetized by augmenting with a certificate [A>B] for every pair of nodesA, B such that B is a child node of A. If the value stored at a node X is a function fX(t) of time, then this certificate is only valid while fA(t) > fB(t). Thus, the failure of this certificate must be scheduled in the event queue at a time t such that fA(t) > fB(t).
All certificate failures are scheduled on the "event queue", which is assumed to be an efficient priority queue whose operations take O(log n) time.
Dealing with certificate failures
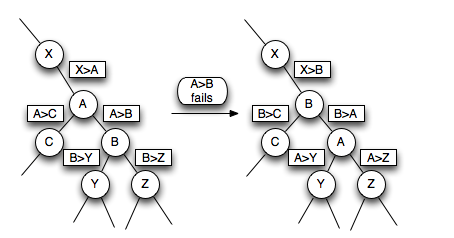
When a certificate [A>B] fails, the data structure must swap A and B in the heap, and update the certificates that each of them was present in.
For example, if (call its child nodes ) was a child node of (call its child nodes and its parent node ), and the certificate [A>B] fails, then the data structure must swap and , then replace the old certificates (and the corresponding scheduled events) [A>B], [A<X], [A>C], [B>Y], [B>Z] with new certificates [B>A], [B<X], [B>C], [A>Y] and [A>Z].





Thus, assuming non-degeneracy of the events (no two events happen at the same time), only a constant number of events need to be de-scheduled and re-scheduled even in the worst case.
Operations
A kinetic heap supports the following operations:
- create-heap(h): create an empty kinetic heap h
- find-max(h, t) (or find-min): - return the max (or min for a min-heap) value stored in the heap h at the current virtual time t.
- insert(X, fX, t): - insert a key X into the kinetic heap at the current virtual time t, whose value changes as a continuous function fX(t) of time t. The insertion is done as in a normal heap in O(log n) time, but O(log n) certificates might need to be changed as a result, so the total time for rescheduling certificate failures is O(log 2 n)
- delete(X, t) - delete a key at the current virtual time t. The deletion is done as in a normal heap in O(log n) time, but O(log n) certificates might need to be changed as a result, so the total time for rescheduling certificate failures is O(log 2 n).
Performance
Kinetic heaps perform well according to the four metrics (responsiveness, locality, compactness and efficiency) of kinetic data structure quality defined by Basch et al.[1] The analysis of the first three qualities is straightforward:
- Responsiveness:A kinetic heap is responsive, since each certificate failure causes the concerned keys to be swapped and leads to only few certificates being replaced in the worst case.
- Locality: Each node is present in one certificate each along with its parent node and two child nodes (if present), meaning that each node can be involved in a total of three scheduled events in the worst case, thus kinetic heaps are local.
- Compactness: Each edge in the heap corresponds to exactly one scheduled event, therefore the number of scheduled events is exactly where n is the number of nodes in the kinetic heap. Thus, kinetic heaps are compact.
Analysis of efficiency
The efficiency of a kinetic heap in the general case is largely unknown.[1][2][3] However, in the special case of affine motion f(t) = at + b of the priorities, kinetic heaps are known to be very efficient.[2]
Affine motion, no insertions or deletions
In this special case, the maximum number of events processed by a kinetic heap can be shown to be exactly the number of edges in the transitive closure of the tree structure of the heap, which is O(nlogn) for a tree of height O(logn) [2]
Affine motion, with insertions and deletions
If n insertions and deletions are made on a kinetic heap that starts empty, the maximum number of events processed is .[4] However, this bound is not believed to be tight,[2] and the only known lower bound is .[4]


Variants
This article deals with "simple" kinetic heaps as described above, but other variants have been developed for specialized applications,[5] such as:
- Fibonacci kinetic heap
- Incremental kinetic heap
Other heap-like kinetic priority queues are:
References
- 1 2 Basch, J., Guibas, L. J., Hershberger, J (1997). "Data structures for mobile data". Proceedings of the eighth annual ACM-SIAM symposium on Discrete algorithms. SODA. Society for Industrial and Applied Mathematics. pp. 747–756. Retrieved May 17, 2012.
- 1 2 3 4 da Fonseca; Guilherme D.; de Figueiredo; Celina M. H. "Kinetic heap-ordered trees: Tight analysis and improved algorithms" (PDF). Information Processing Letters. pp. 165–169. Retrieved May 17, 2012.
- ↑ da Fonseca, Guilherme D. and de Figueiredo, Celina M. H. and Carvalho, Paulo C. P. "Kinetic hanger" (PDF). Information Processing Letters. pp. 151–157. Retrieved May 17, 2012.
- 1 2 Basch, J, Guibas, L. J., Ramkumar, G. D. (1997). "Sweeping lines and line segments with a heap". Proceedings of the thirteenth annual symposium on Computational geometry. SCG. ACM. pp. 469–471. Retrieved May 17, 2012.
- ↑ K. H., Tarjan, R. and T. K. (2001). "Faster kinetic heaps and their use in broadcast scheduling" (PDF). Proc. 12th ACM-SIAM Symposium on Discrete Algorithms. ACM. pp. 836–844. Retrieved May 17, 2012.
Guibas, Leonidas. "Kinetic Data Structures - Handbook" (PDF). Retrieved May 17, 2012.