Generalized eigenvector
In linear algebra, a generalized eigenvector of an n × n matrix is a vector which satisfies certain criteria which are more relaxed than those for an (ordinary) eigenvector.[1]

Let be an n-dimensional vector space; let be a linear map in L(V), the set of all linear maps from into itself; and let be the matrix representation of with respect to some ordered basis.


There may not always exist a full set of n linearly independent eigenvectors of that form a complete basis for . That is, the matrix may not be diagonalizable.[2][3] This happens when the algebraic multiplicity of at least one eigenvalue is greater than its geometric multiplicity (the nullity of the matrix , or the dimension of its nullspace). In this case, is called a defective eigenvalue and is called a defective matrix.[4]


A generalized eigenvector corresponding to , together with the matrix generate a Jordan chain of linearly independent generalized eigenvectors which form a basis for an invariant subspace of .[5][6][7]

Using generalized eigenvectors, a set of linearly independent eigenvectors of can be extended, if necessary, to a complete basis for .[8] This basis can be used to determine an "almost diagonal matrix" in Jordan normal form, similar to , which is useful in computing certain matrix functions of .[9] The matrix is also useful in solving the system of linear differential equations where need not be diagonalizable.[10][11]


Overview and definition
There are several equivalent ways to define an ordinary eigenvector.[12][13][14][15][16][17][18][19] For our purposes, an eigenvector associated with an eigenvalue of an × matrix is a nonzero vector for which , where is the × identity matrix and is the zero vector of length .[20] That is, is in the kernel of the transformation . If has linearly independent eigenvectors, then is similar to a diagonal matrix . That is, there exists an invertible matrix such that is diagonalizable through the similarity transformation .[21][22] The matrix is called a spectral matrix for . The matrix is called a modal matrix for .[23] Diagonalizable matrices are of particular interest since matrix functions of them can be computed easily.[24]










On the other hand, if does not have linearly independent eigenvectors associated with it, then is not diagonalizable.[25][26]
Definition: A vector is a generalized eigenvector of rank m of the matrix and corresponding to the eigenvalue if


but

Clearly, a generalized eigenvector of rank 1 is an ordinary eigenvector.[28] Every × matrix has linearly independent generalized eigenvectors associated with it and can be shown to be similar to an "almost diagonal" matrix in Jordan normal form.[29] That is, there exists an invertible matrix such that .[30] The matrix in this case is called a generalized modal matrix for .[31] If is an eigenvalue of algebraic multiplicity , then will have linearly independent generalized eigenvectors corresponding to .[32] These results, in turn, provide a straightforward method for computing certain matrix functions of .[33]


The set spanned by all generalized eigenvectors for a given , forms the generalized eigenspace for .[34]
Examples
Here are some examples to illustrate the concept of generalized eigenvectors. Some of the details will be described later.
Example 1
This example is simple but clearly illustrates the point. This type of matrix is used frequently in textbooks.[35][36][37] Suppose

Then there is only one eigenvalue, , and its algebraic multiplicity is m = 2.

Notice that this matrix is in Jordan normal form but is not diagonal. Hence, this matrix is not diagonalizable. Since there is one superdiagonal entry, there will be one generalized eigenvector of rank greater than 1 (or one could note that the vector space is of dimension 2, so there can be at most one generalized eigenvector or rank greater than 1). Alternatively, one could compute the dimension of the nullspace of to be p = 1, and thus there are m – p = 1 generalized eigenvectors of rank greater than 1.

Computing the ordinary eigenvector is left to the reader. (See the eigenvector page for examples.) Using this eigenvector, we compute the generalized eigenvector by solving



Writing out the values:

This simplifies to

The element has no restrictions. The generalized eigenvector of rank 2 is then , where a can have any scalar value. The choice of a = 0 is usually the simplest.


Note that

so that is a generalized eigenvector,

so that is an ordinary eigenvector, and that and are linearly independent and hence constitute a basis for the vector space .

Example 2
This example is more complex than Example 1. Unfortunately, it is a little difficult to construct an interesting example of low order.[38] The matrix

has eigenvalues and with algebraic multiplicities and , but geometric multiplicities and .






The generalized eigenspaces of are calculated below. is the ordinary eigenvector associated with . is a generalized eigenvector associated with . is the ordinary eigenvector associated with . and are generalized eigenvectors associated with .












This results in a basis for each of the generalized eigenspaces of . Together the two chains of generalized eigenvectors span the space of all 5-dimensional column vectors.

An "almost diagonal" matrix in Jordan normal form, similar to is obtained as follows:


where is a generalized modal matrix for , the columns of are a canonical basis for , and .[39]

Jordan chains
Definition: Let be a generalized eigenvector of rank m corresponding to the matrix and the eigenvalue . The chain generated by is a set of vectors given by

(1)





Thus, in general,
(2)

The vector , given by (2), is a generalized eigenvector of rank j corresponding to the eigenvalue . A chain is a linearly independent set of vectors.[40]

Canonical basis
Definition: A set of n linearly independent generalized eigenvectors is a canonical basis if it is composed entirely of Jordan chains.
Thus, once we have determined that a generalized eigenvector of rank m is in a canonical basis, it follows that the m − 1 vectors that are in the Jordan chain generated by are also in the canonical basis.[41]

Let be an eigenvalue of of algebraic multiplicity . First, find the ranks (matrix ranks) of the matrices . The integer is determined to be the first integer for which has rank (n being the number of rows or columns of , that is, is n × n).





Now define

The variable designates the number of linearly independent generalized eigenvectors of rank k corresponding to the eigenvalue that will appear in a canonical basis for . Note that

- .[42]

Computation of generalized eigenvectors
In the preceding sections we have seen techniques for obtaining the n linearly independent generalized eigenvectors of a canonical basis for the vector space associated with an n × n matrix . These techniques can be combined into a procedure:
- Solve the characteristic equation of for eigenvalues and their algebraic multiplicities ;
- For each
- Determine ;
- Determine ;
- Determine for ;
- Determine each Jordan chain for ;


Example 3
The matrix

has an eigenvalue of algebraic multiplicity and an eigenvalue of algebraic multiplicity . We also have n = 4. For we have .








The first integer for which has rank is .




We now define



Consequently, there will be three linearly independent generalized eigenvectors; one each of ranks 3, 2 and 1. Since corresponds to a single chain of three linearly independent generalized eigenvectors, we know that there is a generalized eigenvector of rank 3 corresponding to such that

(3)

but
(4)

Equations (3) and (4) represent linear systems that can be solved for . Let

Then

and

Thus, in order to satisfy the conditions (3) and (4), we must have and . No restrictions are placed on and . By choosing , we obtain






as a generalized eigenvector of rank 3 corresponding to . Note that it is possible to obtain infinitely many other generalized eigenvectors of rank 3 by choosing different values of , and , with . Our first choice, however, is the simplest.[43]

Now using equations (1), we obtain and as generalized eigenvectors of rank 2 and 1 respectively, where

and

The simple eigenvalue can be dealt with using standard techniques and has an ordinary eigenvector

A canonical basis for is

and are generalized eigenvectors associated with . is the ordinary eigenvector associated with .

It should be noted that this is a fairly simple example. In general, the numbers of linearly independent generalized eigenvectors of rank k will not always be equal. That is, there may be several chains of different lengths corresponding to a particular eigenvalue.[44]
Generalized modal matrix
Let be an n × n matrix. A generalized modal matrix for is an n × n matrix whose columns, considered as vectors, form a canonical basis for and appear in according to the following rules:
- All Jordan chains consisting of one vector (that is, one vector in length) appear in the first columns of .
- All vectors of one chain appear together in adjacent columns of .
- Each chain appears in in order of increasing rank (that is, the generalized eigenvector of rank 1 appears before the generalized eigenvector of rank 2 of the same chain, which appears before the generalized eigenvector of rank 3 of the same chain, etc.).[45]
Jordan Normal Form
Let be an n-dimensional vector space; let be a linear map in L(V), the set of all linear maps from into itself; and let be the matrix representation of with respect to some ordered basis. It can be shown that if the characteristic polynomial of factors into linear factors, so that has the form


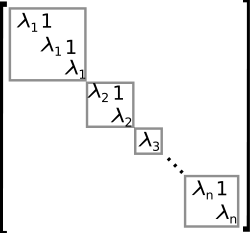
where are the distinct eigenvalues of , then each is the algebraic multiplicity of its corresponding eigenvalue and is similar to a matrix in Jordan normal form, where each appears consecutive times on the diagonal, and each entry above each (that is, on the superdiagonal) is either 0 or 1; the entry above the first occurrence of each is always 0. All other entries are zero. The matrix is as close as one can come to a diagonalization of . If is diagonalizable, then all entries above the diagonal are zero.[46] Note that some textbooks have the ones on the subdiagonal, that is, immediately below the main diagonal instead of on the superdiagonal. The eigenvalues are still on the main diagonal.[47][48]

Every n × n matrix is similar to a matrix in Jordan normal form, obtained through the similarity transformation , where is a generalized modal matrix for .[49]
Example 4
Find a matrix in Jordan normal form that is similar to

Solution: The characteristic equation of is , hence, is an eigenvalue of algebraic multiplicity three. Following the procedures of the previous sections, we find that



and

Thus, and , which implies that a canonical basis for will contain one linearly independent generalized eigenvector of rank 2 and two linearly independent generalized eigenvectors of rank 1, or equivalently, one chain of two vectors and one chain of one vector . Designating , we find that






and

where is a generalized modal matrix for , the columns of are a canonical basis for , and .[50] Note that since generalized eigenvectors themselves are not unique, and since some of the columns of both and may be interchanged, it follows that both and are not unique.[51]
Example 5
In Example 3, we found a canonical basis of linearly independent generalized eigenvectors for a matrix . A generalized modal matrix for is

A matrix in Jordan normal form, similar to is

so that .
Applications
Matrix functions
Three of the most fundamental operations which can be performed on square matrices are matrix addition, multiplication by a scalar, and matrix multiplication.[52] These are exactly those operations necessary for defining a polynomial function of an n × n matrix .[53] If we recall from basic calculus that many functions can be written as a Maclaurin series, then we can define more general functions of matrices quite easily.[54] If is diagonalizable, that is

with

then

and the evaluation of the Maclaurin series for functions of is greatly simplified.[55] For example, to obtain any power k of , we need only compute , premultiply by , and postmultiply the result by .[56]


Using generalized eigenvectors, we can obtain the Jordan normal form for and these results can be generalized to a straightforward method for computing functions of nondiagonalizable matrices.[57] (See Matrix function#Jordan decomposition.)
Differential equations
Consider the problem of solving the system of linear ordinary differential equations
(5)
where
- and


If the matrix is a diagonal matrix so that for , then the system (5) reduces to a system of n equations which take the form


(6)



In this case, the general solution is given by



In the general case, we try to diagonalize and reduce the system (5) to a system like (6) as follows. If is diagonalizable, we have , where is a modal matrix for . Substituting , equation (5) takes the form , or


(7)

where
(8)

The solution of (7) is



The solution of (5) is then obtained using the relation (8).[58]

On the other hand, if is not diagonalizable, we choose to be a generalized modal matrix for , such that is the Jordan normal form of . The system has the form

(9)

where the are the eigenvalues from the main diagonal of and the are the ones and zeros from the superdiagonal of . The system (9) is often more easily solved than (5). We may solve the last equation in (9) for , obtaining . We then substitute this solution for into the next to last equation in (9) and solve for . Continuing this procedure, we work through (9) from the last equation to the first, solving the entire system for . The solution is then obtained using the relation (8).[59]





Notes
- ↑ Bronson (1970, p. 189)
- ↑ Beauregard & Fraleigh (1973, p. 310)
- ↑ Nering (1970, p. 118)
- ↑ Golub & Van Loan (1996, p. 316)
- ↑ Beauregard & Fraleigh (1973, p. 319)
- ↑ Bronson (1970, pp. 194-195)
- ↑ Golub & Van Loan (1996, p. 311)
- ↑ Bronson (1970, p. 196)
- ↑ Bronson (1970, p. 189)
- ↑ Beauregard & Fraleigh (1973, p. 316-318)
- ↑ Nering (1970, p. 118)
- ↑ Anton (1987, pp. 301-302)
- ↑ Beauregard & Fraleigh (1973, p. 266)
- ↑ Burden & Faires (1993, p. 401)
- ↑ Golub & Van Loan (1996, pp. 310-311)
- ↑ Harper (1976, p. 58)
- ↑ Herstein (1964, p. 225)
- ↑ Kreyszig (1972, pp. 273,684)
- ↑ Nering (1970, p. 104)
- ↑ Burden & Faires (1993, p. 401)
- ↑ Beauregard & Fraleigh (1973, pp. 270-274)
- ↑ Bronson (1970, pp. 179-183)
- ↑ Bronson (1970, p. 181)
- ↑ Bronson (1970, p. 179)
- ↑ Beauregard & Fraleigh (1973, pp. 270-274)
- ↑ Bronson (1970, pp. 179-183)
- ↑ Bronson (1970, p. 189)
- ↑ Bronson (1970, pp. 190,202)
- ↑ Bronson (1970, pp. 189,203)
- ↑ Bronson (1970, pp. 206-207)
- ↑ Bronson (1970, p. 205)
- ↑ Bronson (1970, p. 196)
- ↑ Bronson (1970, pp. 189,209-215)
- ↑ Nering (1970, p. 118)
- ↑ Nering (1970, p. 118)
- ↑ Herstein (1964, p. 261)
- ↑ Beauregard & Fraleigh (1973, p. 310)
- ↑ Nering (1970, pp. 122,123)
- ↑ Bronson (1970, pp. 189-209)
- ↑ Bronson (1970, pp. 194-195)
- ↑ Bronson (1970, pp. 196,197)
- ↑ Bronson (1970, pp. 197,198)
- ↑ Bronson (1970, pp. 190-191)
- ↑ Bronson (1970, pp. 197-198)
- ↑ Bronson (1970, p. 205)
- ↑ Beauregard & Fraleigh (1973, p. 311)
- ↑ Cullen (1966, p. 114)
- ↑ Franklin (1968, p. 122)
- ↑ Bronson (1970, p. 207)
- ↑ Bronson (1970, pp. 208)
- ↑ Bronson (1970, p. 206)
- ↑ Beauregard & Fraleigh (1973, pp. 57-61)
- ↑ Bronson (1970, p. 104)
- ↑ Bronson (1970, p. 105)
- ↑ Bronson (1970, p. 184)
- ↑ Bronson (1970, p. 185)
- ↑ Bronson (1970, pp. 209-218)
- ↑ Beauregard & Fraleigh (1973, pp. 274-275)
- ↑ Beauregard & Fraleigh (1973, p. 317)
References
- Anton, Howard (1987), Elementary Linear Algebra (5th ed.), New York: Wiley, ISBN 0-471-84819-0
- Axler, Sheldon (1997). Linear Algebra Done Right (2nd ed.). Springer. ISBN 978-0-387-98258-8.
- Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields, Boston: Houghton Mifflin Co., ISBN 0-395-14017-X
- Bronson, Richard (1970), Matrix Methods: An Introduction, New York: Academic Press, LCCN 70097490
- Burden, Richard L.; Faires, J. Douglas (1993), Numerical Analysis (5th ed.), Boston: Prindle, Weber and Schmidt, ISBN 0-534-93219-3
- Cullen, Charles G. (1966), Matrices and Linear Transformations, Reading: Addison-Wesley, LCCN 66021267
- Franklin, Joel N. (1968), Matrix Theory, Englewood Cliffs: Prentice-Hall, LCCN 68016345
- Golub, Gene H.; Van Loan, Charles F. (1996), Matrix Computations (3rd ed.), Baltimore: Johns Hopkins University Press, ISBN 0-8018-5414-8
- Harper, Charlie (1976), Introduction to Mathematical Physics, New Jersey: Prentice-Hall, ISBN 0-13-487538-9
- Herstein, I. N. (1964), Topics In Algebra, Waltham: Blaisdell Publishing Company, ISBN 978-1114541016
- Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3rd ed.), New York: Wiley, ISBN 0-471-50728-8
- Nering, Evar D. (1970), Linear Algebra and Matrix Theory (2nd ed.), New York: Wiley, LCCN 76091646