Morphism
In many fields of mathematics, morphism refers to a structure-preserving map from one mathematical structure to another. The notion of morphism recurs in much of contemporary mathematics. In set theory, morphisms are functions; in linear algebra, linear transformations; in group theory, group homomorphisms; in topology, continuous functions, and so on.
In category theory, morphism is a broadly similar idea, but somewhat more abstract: the mathematical objects involved need not be sets, and the relationship between them may be something more general than a map.
The study of morphisms and of the structures (called "objects") over which they are defined is central to category theory. Much of the terminology of morphisms, as well as the intuition underlying them, comes from concrete categories, where the objects are simply sets with some additional structure, and morphisms are structure-preserving functions. In category theory, morphisms are sometimes also called arrows.
Definition
A category C consists of two classes, one of objects and the other of morphisms.
There are two objects that are associated to every morphism, the source and the target.
For many common categories, objects are sets (usually with more structure) and morphisms are functions from an object to another object. Therefore, the source and the target of a morphism are often called domain and codomain respectively.
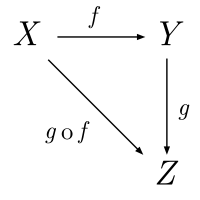
A morphism f with source X and target Y is written f : X → Y. Thus a morphism is represented by an arrow from its source to its target.
Morphisms are equipped with a partial binary operation, called composition. The composition of two morphisms f and g is defined if and only if the target of g is the source of f, and is denoted f∘g. The source of f∘g is the source of g, and the target of f∘g is the target of f. The composition satisfies two axioms:
- Identity
- For every object X, there exists a morphism idX : X → X called the identity morphism on X, such that for every morphism f : A → B we have idB ∘ f = f = f ∘ idA.
- Associativity
- h ∘ (g ∘ f) = (h ∘ g) ∘ f whenever the operations are defined, that is when the target of f is the source of g, and the target of g is the source of h.
For a concrete category (that is the objects are sets with additional structure, and of the morphisms as structure-preserving functions), the identity morphism is just the identity function, and composition is just the ordinary composition of functions. Associativity then follows, because the composition of functions is associative.
The composition of morphisms is often represented by a commutative diagram. For example,
The collection of all morphisms from X to Y is denoted homC(X,Y) or simply hom(X, Y) and called the hom-set between X and Y. Some authors write MorC(X,Y), Mor(X, Y) or C(X, Y). Note that the term hom-set is something of a misnomer as the collection of morphisms is not required to be a set. A category where hom(X, Y) is a set for all objects X and Y is called locally small.
Note that the domain and codomain are in fact part of the information determining a morphism. For example, in the category of sets, where morphisms are functions, two functions may be identical as sets of ordered pairs (may have the same range), while having different codomains. The two functions are distinct from the viewpoint of category theory. Thus many authors require that the hom-classes hom(X, Y) be disjoint. In practice, this is not a problem because if this disjointness does not hold, it can be assured by appending the domain and codomain to the morphisms, (say, as the second and third components of an ordered triple).
Some special morphisms
Monomorphisms and epimorphisms
A morphism f: X → Y is called a monomorphism if f ∘ g1 = f ∘ g2 implies g1 = g2 for all morphisms g1, g2: Z → X. It is also called a mono or a monic.[1]
- A morphism f has a left inverse if there is a morphism g: Y → X such that g ∘ f = idX. The left inverse g is also called a retraction of f.[1] Morphisms with left inverses are always monomorphisms, but the converse is not always true in every category; a monomorphism may fail to have a left-inverse.
- A split monomorphism h: X → Y is a monomorphism having a left inverse g: Y → X, so that g ∘ h = idX. Thus h ∘ g: Y → Y is idempotent; that is, (h ∘ g)2 = h ∘ (g ∘ h) ∘ g = h ∘ g.
- In concrete categories, a function that has a left inverse is injective. Thus in concrete categories, monomorphisms are often, but not always, injective. The condition of being an injection is stronger than that of being a monomorphism, but weaker than that of being a split monomorphism.
Dually to monomorphisms, a morphism f: X → Y is called an epimorphism if g1 ∘ f = g2 ∘ f implies g1 = g2 for all morphisms g1, g2: Y → Z. It is also called an epi or an epic.[1]
- A morphism f has a right-inverse if there is a morphism g: Y → X such that f ∘ g = idY. The right inverse g is also called a section of f.[1] Morphisms having a right inverse are always epimorphisms, but the converse is not always true in every category, as an epimorphism may fail to have a right inverse.
- A split epimorphism is an epimorphism having a right inverse. If a monomorphism f splits with left-inverse g, then g is a split epimorphism with right-inverse f.
- In concrete categories, a function that has a right inverse is surjective. Thus in concrete categories, epimorphisms are often, but not always, surjective. The condition of being a surjection is stronger than that of being an epimorphism, but weaker than that of being a split epimorphism. In the category of sets, every surjection has a section, a result equivalent to the axiom of choice.
A morphism that is both an epimorphism and a monomorphism is called a bimorphism.
Isomorphisms
A morphism f: X → Y is called an isomorphism if there exists a morphism g: Y → X such that f ∘ g = idY and g ∘ f = idX. If a morphism has both left-inverse and right-inverse, then the two inverses are equal, so f is an isomorphism, and g is called simply the inverse of f. Inverse morphisms, if they exist, are unique. The inverse g is also an isomorphism with inverse f. Two objects with an isomorphism between them are said to be isomorphic or equivalent. Note that while every isomorphism is a bimorphism, a bimorphism is not necessarily an isomorphism. For example, in the category of commutative rings the inclusion Z → Q is a bimorphism that is not an isomorphism. However, any morphism that is both an epimorphism and a split monomorphism, or both a monomorphism and a split epimorphism, must be an isomorphism. A category, such as Set, in which every bimorphism is an isomorphism is known as a balanced category.
Endomorphisms and automorphisms
A morphism f: X → X (that is, a morphism with identical source and target) is an endomorphism of X. A split endomorphism is an idempotent endomorphism f if f admits a decomposition f = h ∘ g with g ∘ h = id. In particular, the Karoubi envelope of a category splits every idempotent morphism.
An automorphism is a morphism that is both an endomorphism and an isomorphism. In every category, the automorphisms of an object form always a group, called the automorphism group of the object.
Examples
- In the concrete categories studied in universal algebra (groups, rings, modules, etc.), morphisms are usually homomorphisms. Likewise, the notions of automorphism, endomorphism, epimorphism, homeomorphism, isomorphism, and monomorphism all find use in universal algebra.
- In the category of topological spaces, morphisms are continuous functions and isomorphisms are called homeomorphisms.
- In the category of smooth manifolds, morphisms are smooth functions and isomorphisms are called diffeomorphisms.
- In the category of small categories, functors can be thought of as morphisms.
- In a functor category, the morphisms are natural transformations.
For more examples, see the entry category theory.
See also
Notes
References
- Jacobson, Nathan (2009), Basic algebra, 2 (2nd ed.), Dover, ISBN 978-0-486-47187-7.
- Adámek, Jiří; Herrlich, Horst; Strecker, George E. (1990). Abstract and Concrete Categories (PDF). John Wiley & Sons. ISBN 0-471-60922-6. Now available as free on-line edition (4.2MB PDF).
External links
- Hazewinkel, Michiel, ed. (2001), "Morphism", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- "Category". PlanetMath.
- "TypesOfMorphisms". PlanetMath.